Компания Skild AI сообщила о новой концепции тренировки ИИ — не на запоминании, а на обобщении. Тренировка на примерах никогда не подготовит ИИ и ведомого им робота к реальной жизни, и это не позволит робототехнике быть эффективной рядом с человеком. Только умеющий адаптироваться к любым условиям ИИ способен породить искру разума.

Содержание статьи
- 1 Обзор ноутбука HONOR MagicBook Pro 16 HUNTER 2025. Для игр? Для работы? Для игр и работы!
- 2 Ноутбуки HONOR MagicBook: технологии, дизайн и производительность для любых задач
- 3 Обзор видеокарты Acer Nitro Intel Arc B580 OC
- 4 Обзор планшета HUAWEI MatePad 11,5» (2025): апгрейд без бликов
- 5 Обзор смартфона HUAWEI Pura 80 Pro: разумный флагман с мощнейшей камерой
- 6 В чем уникальность зум-камеры HUAWEI Pura 80 Ultra?
- 7 Компьютер месяца — сентябрь 2025 года
- 8 Шестиядерники за 10 тысяч рублей — сравнение и тесты
Обзор ноутбука HONOR MagicBook Pro 16 HUNTER 2025. Для игр? Для работы? Для игр и работы!

Ноутбуки HONOR MagicBook: технологии, дизайн и производительность для любых задач

Обзор видеокарты Acer Nitro Intel Arc B580 OC

Обзор планшета HUAWEI MatePad 11,5» (2025): апгрейд без бликов

Обзор смартфона HUAWEI Pura 80 Pro: разумный флагман с мощнейшей камерой

В чем уникальность зум-камеры HUAWEI Pura 80 Ultra?

Компьютер месяца — сентябрь 2025 года

Шестиядерники за 10 тысяч рублей — сравнение и тесты
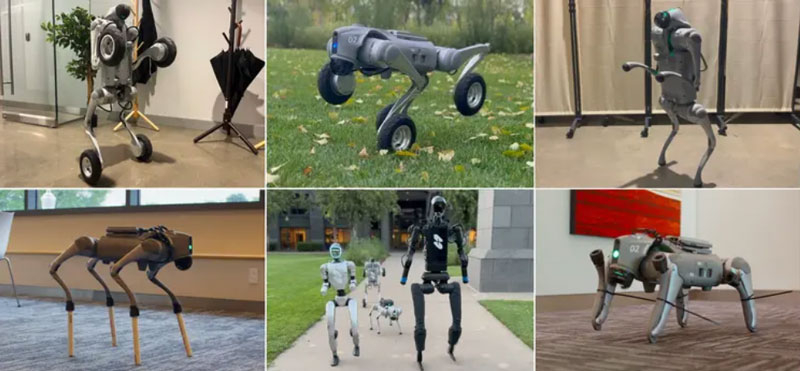
Примеры «издевательств» над роботами. Источник изображения: Skild AI
Разработчики подчёркивают, что все популярные видео с роботами показывают идеальные сценарии, где машины выполняют задачи безупречно, но в непредсказуемых ситуациях, таких как поломки или изменения среды, они быстро выходят из строя. Это несоответствие обусловлено фундаментальными ограничениями традиционного ИИ, который неспособен к настоящей адаптации. Введение в концепцию «omni-bodied robot brain» — универсального «мозга» для всех роботов — позиционируется ими как решение, способное преодолеть эти барьеры и приблизить робототехнику к надёжному ИИ в физическом мире.
Традиционный ИИ для роботов, особенно в задачах перемещения и манипуляции объектами, обучается на конкретных моделях тел, что сопровождается переобучением: система «запоминает» стратегии для идеальных условий поведения каждого тела, но теряет эффективность при малейших отклонениях. Как отмечают авторы, это похоже на заучивание ответов студентами — полезно на экзамене, но бесполезно на практике.
Для роботов, в частности, это может быть заклинивший мотор, сломанная конечность или загрузка в новое тело. Тем самым современный ИИ не может обобщать знания, и робот просто падает, не зная, как восстановиться. Такая узкая специализация делает роботов ненадёжными для реального применения, где неожиданности — это норма.
Skild AI предлагает радикальный подход: обучение ИИ управлению огромным разнообразием роботов, чтобы избежать переобучения и развить способность к обобщению. Команда создала симулированную вселенную со 100 000 различных роботов и обучила модель контролировать их всех в течение эквивалента тысячелетия симулированного времени. Получившийся «многотелесный разум» адаптируется к новым или повреждённым телам моментально — без дополнительного обучения на конкретных примерах.
Ключевой принцип: модель не может полагаться на запоминание, поскольку стратегии должны работать для всех тел сразу, что стимулирует развитие универсальных навыков. Это также было подтверждено на практике: универсальный ИИ был загружен в модели роботов, которыми он управлял впервые, и это не привело к отказу машин — ИИ моментально сориентировался и начал выполнять работу.
Демонстрация адаптации подчёркивает перспективы этого подхода через обучение на ошибках в реальном времени. Например, четвероногий робот, лишившийся ноги, после нескольких падений за очень короткое время переходит на походку на двух ногах, как у человека. Другие случаи: при блокировке колена робот перераспределяет вес на три ноги; заклинившее колесо заставляет перейти от колёсного хода к пешему; удлинённые ноги (как на ходулях) требуют корректировки шага для баланса. Все тесты проводились сходу, без дообучения, показывая, как ИИ обнаруживает новые стратегии всего за 7–8 секунд, например, совершая амплитудные махи бедром при потере икры.
Разработчики видят в своём решении ранние признаки интеллекта в робототехнике, что в итоге способно привести к появлению настоящих роботов-помощников людям — на заводах, в больницах и домах. Подход Skild AI подчёркивает: для успеха в реальности роботы должны контролировать «все возможные тела», а не несколько, открывая путь к этичному и полезному будущему, где машины помогут людям в повседневности.
